
Предложено решение по созданию реконфигурируемого ячеистого заполнителя адаптивного крыла на основе сетевого объединения шарниров со скрытыми топологическими поверхностями (тритетрафлексогонов, цилиндрических шарниров двойного действия D-CORE).
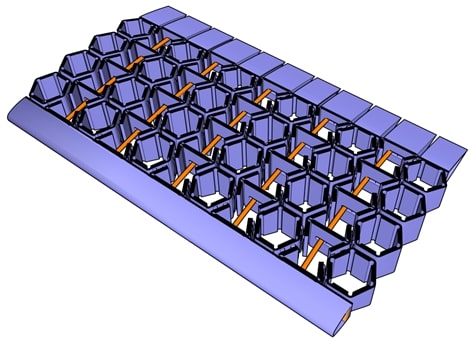
В основе двух предлагаемых вариантов конструкций каркаса адаптивного крыла (рис. 1) лежит использование реконфигурируемого ячеистого заполнителя в совокупности с приводами (рис. 3, 8), которые призваны обеспечить заданный угол согласованного изменения положения между элементами в структуре адаптивного крыла.
 |
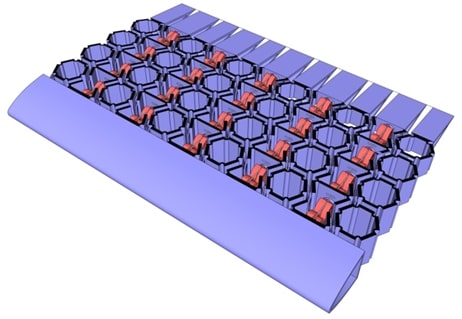 |
| а – с «рычажным» приводом | б – с мехатронным узлом |
Реконфигурируемый ячеистый заполнитель адаптивного крыла представляет собой управляемую динамическую пространственную структуру (флексагонную сетку [4]), подвижные сочленения ячеек которой составляют шарниры со скрытыми топологическими поверхностями (compliant rolling-contact D-CORE) [5, 6]).
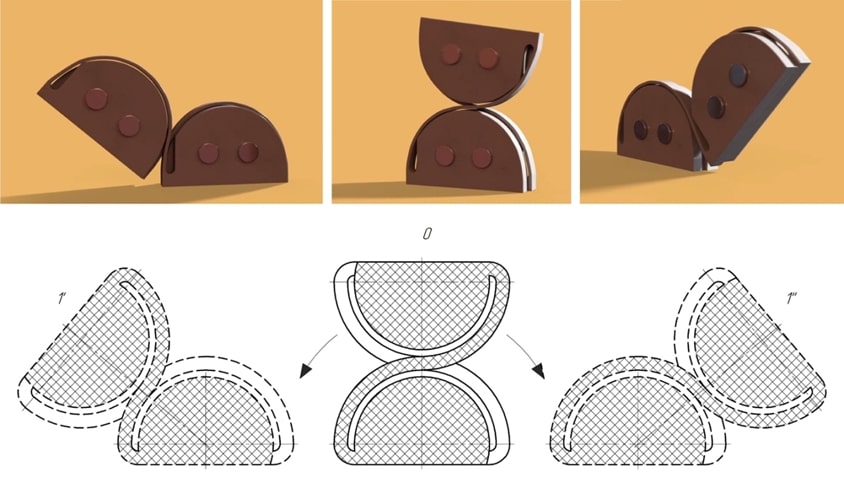
Для конструкции D-CORE, как механического узла, характерно наличие упругих взаимообратных связей и непрерывно изменяющаяся ось вращения (рис. 2).
Вариант №1
На рисунке 3 представлен первый вариант решения по созданию изменяемой пространственной формы каркаса адаптивного крыла.
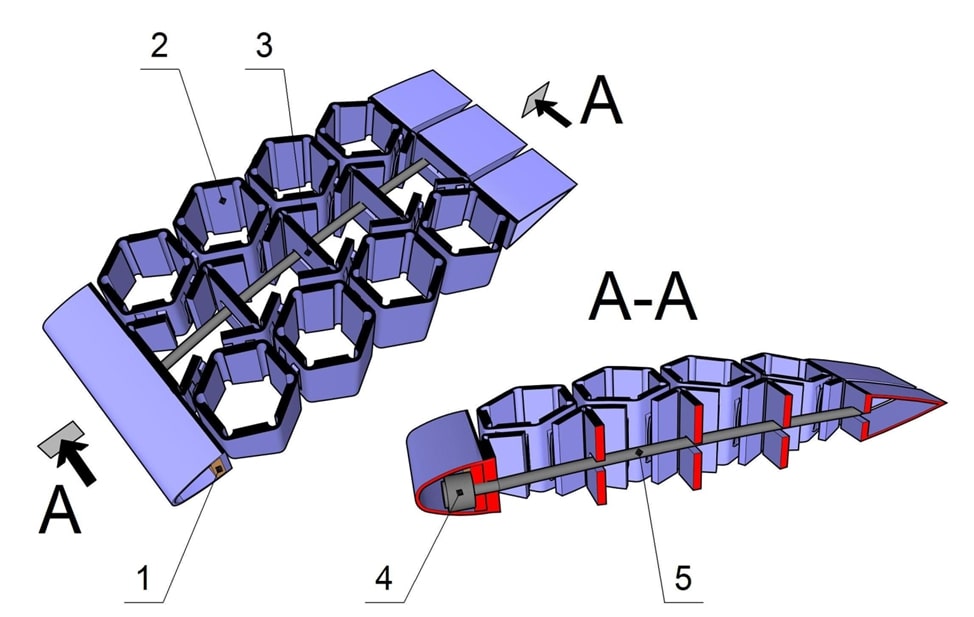
1 – лонжерон; 2 – гексагональная ячейка; 3 – разорванная по контуру гексагональная ячейка с перемычкой; 4 – электромеханический привод; 5 – рычаг
Изменение пространственной формы каркаса крыла происходит относительно жесткой конструкции, обеспеченной лонжероном.
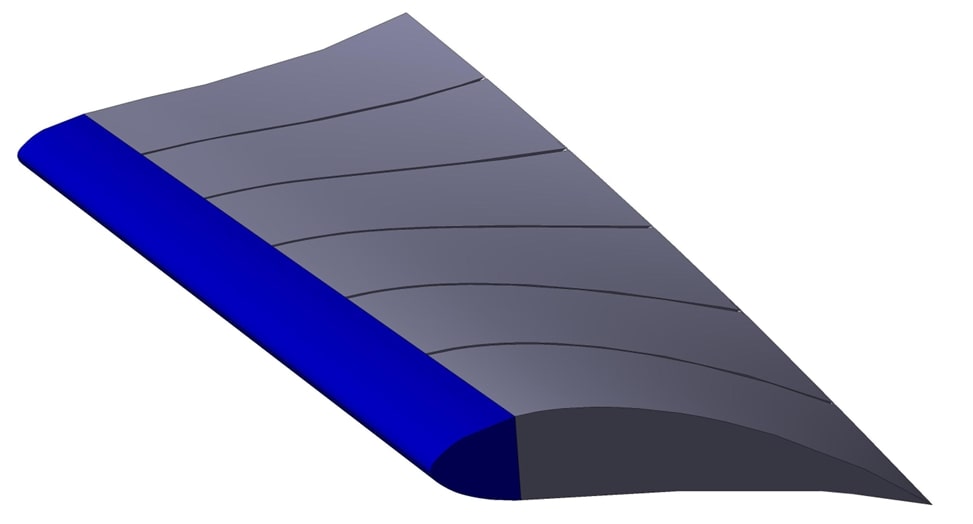
Элементы конструкции, формирующие структуру каркаса, вписаны в контур профиля крыла (рис. 4). Данный ячеистый заполнитель способен изменять свою пространственную форму в соответствии с требованиями изменения режимов полета.
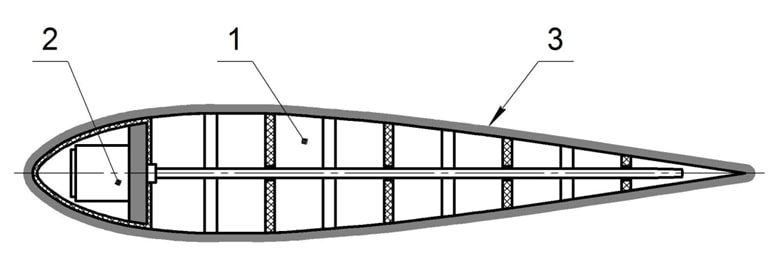
1 – шарнирный сотовый заполнитель; 2 – электромеханический привод; 3 – обшивка
Гексагональные и разорванные по контуру гексоганальные ячейки с перемычками (рис. 3) объединены между собой в структуру реконфигурируемого ячеистого заполнителя посредством цилиндрических шарниров двойного действия (D-CORE) (рис. 5).
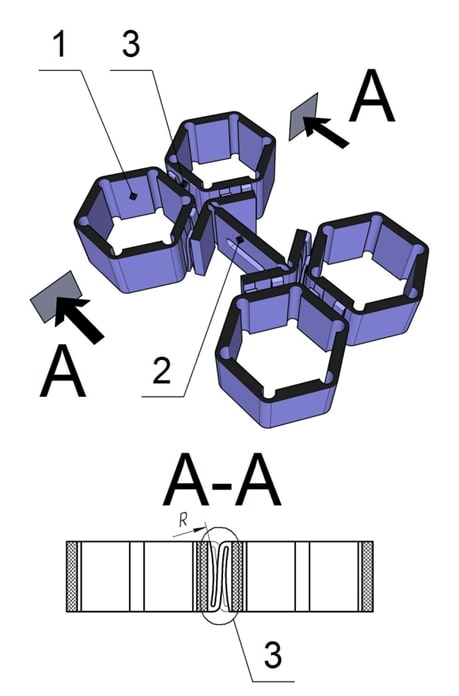
1 – гексагональная ячейка; 2 – разорванная по контуру гексагональная ячейка с перемычкой; 3 – цилиндрический шарнир двойного действия (D-CORE)
Элементы, образующие ячеистую структуру заполнителя, выполнены деформируемыми в ребрах.
В рассматриваемой схеме, управление пространственным положением ячеистого заполнителя осуществляется путем вращения искривленного в одной плоскости рычага, одним концом связанного с валом электромеханического привода. Рычаг проходит через пазы в перемычках элементов разорванных по контуру (рис. 5), изгибая ячеистую структуру крыла и тем самым изменяя его геометрию с учетом аэродинамических и технологических требований, предъявляемых к конструкции, с плавным переходом системы из одного положения в другое (рис. 7).
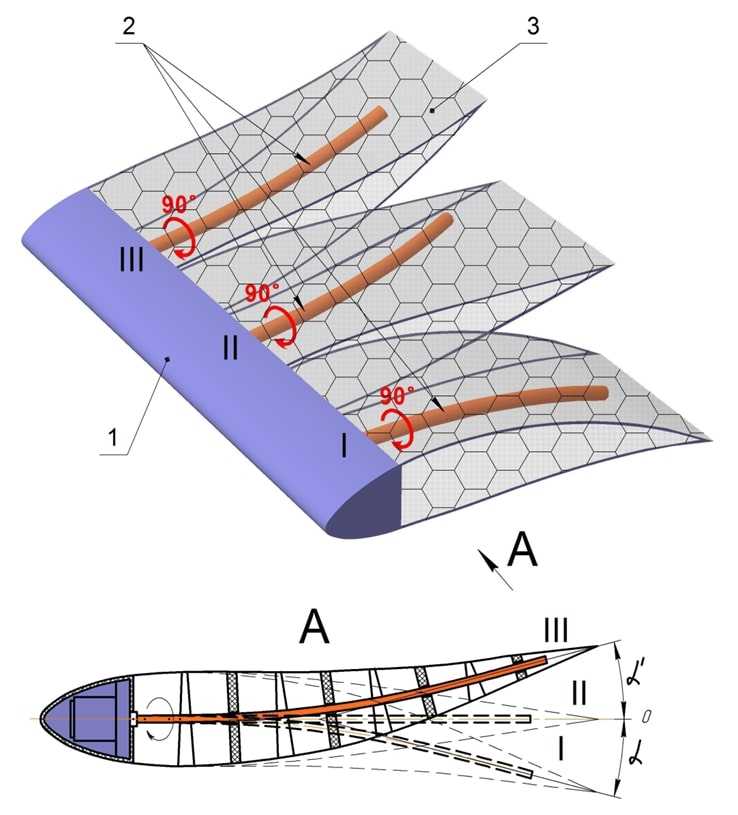
1 – жесткая часть конструкции; 2 – рычаг; 3 – ячеистый заполнитель (показан условно); I – отклонение вниз; II – нейтральное положение; III - отклонение вверх
Вариант №2
В данном случае управление пространственным положением реконфигурируемого ячеистого заполнителя каркаса адаптивного крыла достигается путем использования мехатронного узла, интегрированного в структуру заполнителя (рис. 8).
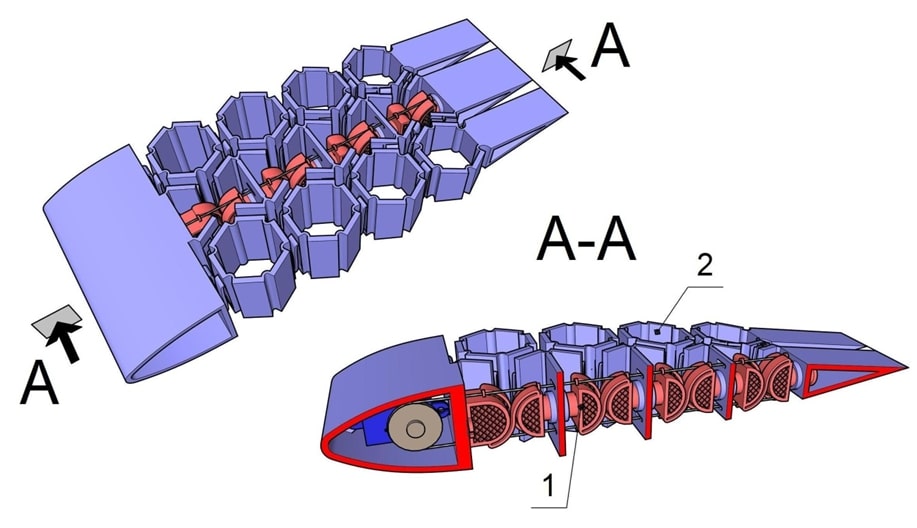
1 – мехатронный узел; 2 – реконфигурируемый ячеистый заполнитель
Мехатронный узел (рис. 9) представляет собой последовательное объединение шарниров двойного действия (D-CORE) (рис. 2) с промежуточными цилиндрическими элементами.
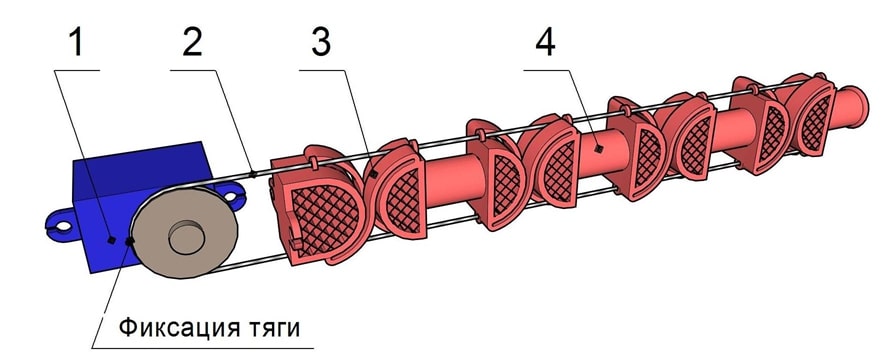
1 – сервопривод; 2 – тяга; 3 – цилиндрический шарнир двойного действия (D-CORE); 4 – цилиндрическая часть под скользящее поворотное соединение
Управление мехатронным узлом осуществляется путем натяжения-ослабления тяги, переброшенной через шкив, связанный с валом сервопривода (рис. 9, 10).
Предложенная на рис. 9 конструктивная схема может иметь и другие технические решения. Например, с использованием электромеханических, пьезо-, пневматических и гидравлических актуаторов, а также «материалов с памятью» (с нитиноловой нитью [8]).
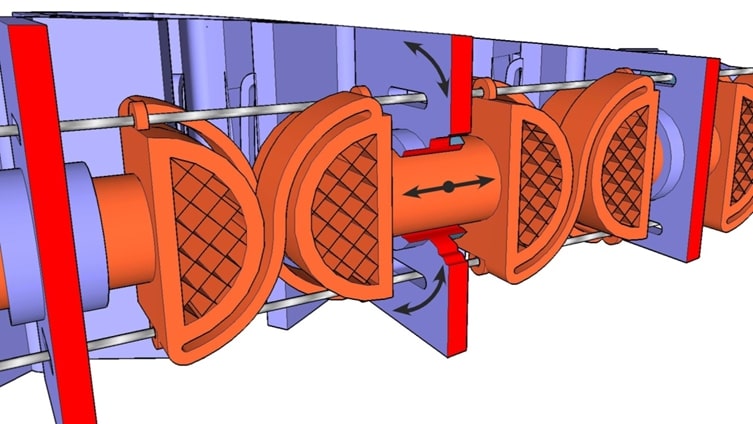
Сопряжение мехатронного узла с элементами реконфигурируемого ячеистого заполнителя выполнено в виде скользящего поворотного соединения (рис. 11). Данный вид подвижного соединения призван скомпенсировать деформации ячеистого заполнителя в процессе изменения его пространственной формы, в результате работы смежных мехатронных узлов.
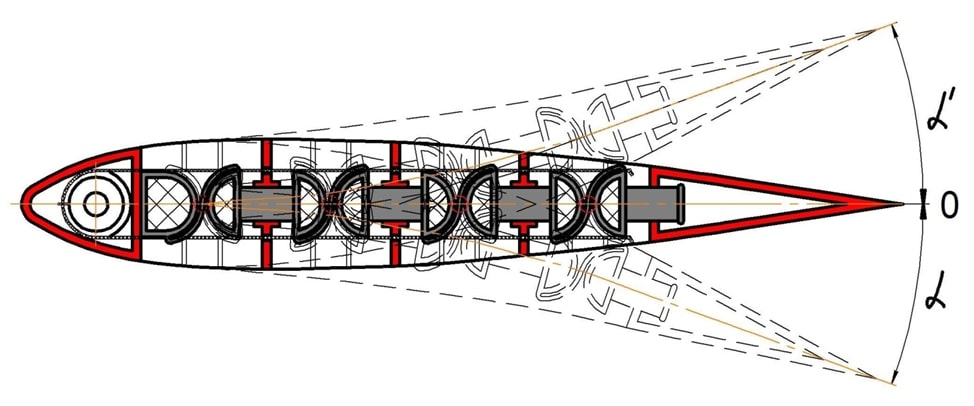
Согласованная работа приводов, интегрированных в структуру реконфигурируемого ячеистого заполнителя, как в первом, так и во втором вариантах решений, обеспечивает требуемые изменения положения между элементами конструкции крыла (рис. 12).
Определенную техническую сложность представляет подбор материала обшивки крыла (рис. 12). В качестве оптимального варианта нам видится использование силиконовых эластомеров.
Положенный в основу предлагаемых решений принцип управления геометрией крыла является частным случаем и может быть распространен на управление геометрией всего корпуса летательного аппарата.
СПИСОК ЛИТЕРАТУРЫ:
- [1] Адаптивное крыло [Электронный ресурс]. URL: dir.md/wiki/Адаптивное_управляемое_крыло?host=ru.wikipedia.org [дата обращения 05.06.2018].
- [2] NASA'S MIGHTY MORPHING WINGS MAKE FOR MORE EFFICIENT FLYING [Электронный ресурс]. URL: https://www.wired.com/2016/11/nasas-mighty-morphing-wings-make-efficient-flying [дата обращения 05.06.2018].
- [3] FlexSys Morphing Wing [Электронный ресурс]. URL: https://www.liveleak.com/view?t=fb6_1478428583 [дата обращения 05.06.2018].
- [4] A.V. Ivchenko, R. Ziatdinov, Flexagon grid: a novel method of creating dynamic spatial forms based on the synthesis of tritetraflexagons, Eng. Sci. Tech., Int. J. (2017).
- [5] T. G. Nelson, R. J. Lang, S. P. Magleby, and L. L. Howell, "Curved-folding-inspired deployable compliant rolling-contact element (D-CORE)," Mechanism and Machine Theory, vol. 96, pp. 225-238, 2016.
- [6] Larry L. Howell, Todd Nelson. Patent US20160177605A1, 2015. Deployable joint.
- [7] Павел Булат. На пути к пятому и шестому поколению. [Электронный ресурс]. URL: http://otvaga2004.ru/kaleydoskop/kaleydoskop-air/5-6-pokoleniye-6/ [дата обращения 26.07.2018].
- [8] Austin Taylor, Trent Slutzky, Leah Feuerman, Mable Fok, Zion Tsz Ho Tse, «Origami Endoscope Design for MRI-Guided Therapy» Published: 10 April 2017 by ASME International in 2017 Design of Medical Devices Conference 2017 Design of Medical Devices Conference; doi:10.1115/dmd2017-3352.
