
Гидролокатор может делать подводные изображения, но он ограничен в охвате пространства. С другой стороны, воздушные радиолокационные системы с синтезированной апертурой обеспечивают получение изображений всего земного ландшафта с высоким разрешением, но не способны глубоко проникать в воду.
Комбинируя свет и звук можно преодолеть, казалось бы, непреодолимый барьер на границе раздела воздуха и воды. В этом суть воздушного метода визуализации подводных объектов. Новая методика устраняет разрыв между электромагнитным изображением в воздухе и сонарным изображением в воде за счет индуцированного лазером фотоакустического эффекта и высокочувствительного ультразвукового обнаружения в воздухе.
Инженеры Стэнфордского университета предполагают, что их гибридная оптико-акустическая система однажды будет использоваться для проведения биологических исследований моря с помощью дронов с воздуха, проведения крупномасштабных воздушных поисков затонувших кораблей и самолетов и картирования глубин океана с аналогичной скоростью и уровнем деталь как пейзажи Земли. Их «Фотоакустическая авиационная сонарная система» подробно описана в недавнем исследовании, опубликованном в журнале IEEE Access
«Бортовые и космические радиолокационные и лазерные системы, или лидары, могут отображать ландшафты Земли на протяжении десятилетий. Радиолокационные сигналы могут даже проникать сквозь облачность и покров. Однако морская вода слишком поглощает воду, чтобы ее можно было увидеть», - говорит руководитель исследования Амин Арбабиан, доцент кафедры электротехники в Стэнфордской школе инженерии. «Наша цель - разработать более надежную систему, которая может отображать изображения даже в мутной воде».
Потеря энергии
Океаны покрывают около 70% поверхности Земли, но лишь небольшая часть их глубин подверглась визуализации и картированию с высоким разрешением.
Главный барьер связан с физикой: звуковые волны, например, не могут переходить из воздуха в воду или наоборот, не теряя большую часть - более 99,9%- своей энергии из-за отражения от другой среды. Система, которая пытается видеть под водой, используя звуковые волны, идущие из воздуха в воду и обратно в воздух, подвергается этой потере энергии дважды, что приводит к снижению энергии на 99,9999%.
Точно так же электромагнитное излучение - общий термин, который включает световые, микроволновые и радиолокационные сигналы - также теряет энергию при переходе из одной физической среды в другую, хотя механизм отличается от механизма звука. «Свет также теряет часть энергии из-за отражения, но большая часть потерь энергии происходит из-за поглощения водой», - пояснил первый автор исследования Эйдан Фицпатрик, аспирант Стэнфордского университета по электротехнике. Между прочим, это поглощение также является причиной того, почему солнечный свет не может проникать в глубину океана и почему ваш смартфон, который полагается на сотовые сигналы, форму электромагнитного излучения, не может принимать звонки под водой.
Результатом всего этого является то, что океаны нельзя отображать с воздуха и из космоса так же, как на суше. На сегодняшний день большая часть подводного картографирования достигается путем прикрепления гидролокаторов к судам, которые отслеживают заданный интересующий регион. Но этот метод медленный, дорогостоящий и неэффективный для покрытия больших площадей.

Невидимая головоломка
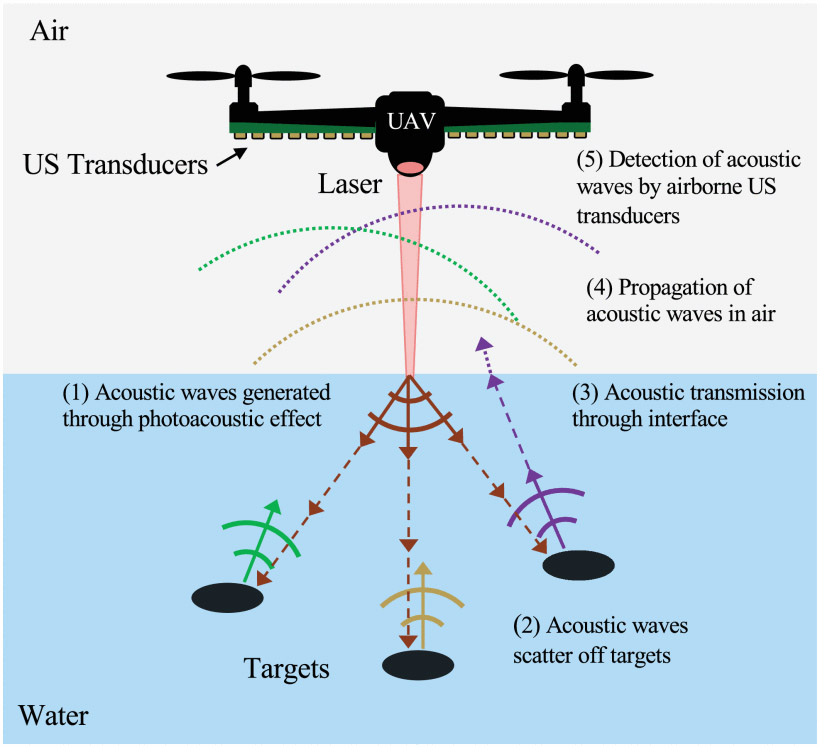
Фотоакустический бортовой гидролокатор (PASS) сочетает свет и звук для преодоления границы раздела воздух-вода. Идея его возникла из другого проекта, в котором использовались микроволны для выполнения «бесконтактного» изображения и характеристики подземных корней растений. Некоторые инструменты PASS изначально были разработаны для этой цели в сотрудничестве с лабораторией Стэнфордского профессора электротехники Бутруса Хури-Якуба.
Система сначала запускает лазер из воздуха, который поглощается поверхностью воды. Когда лазер поглощается, он генерирует ультразвуковые волны, которые распространяются вниз через толщу воды и отражаются от подводных объектов, прежде чем вернуться к поверхности.
Возвращающиеся звуковые волны по-прежнему теряют большую часть своей энергии, когда они пробиваются через поверхность воды, но, генерируя звуковые волны под водой с помощью лазеров, исследователи могут предотвратить потерю энергии дважды.
Отраженные ультразвуковые волны регистрируются приборами, называемыми преобразователями. Затем используется программное обеспечение, чтобы собрать акустические сигналы вместе, как невидимую головоломку, и восстановить трехмерное изображение подводного объекта или объекта.
Подобно тому, как свет преломляется или искажается, когда он проходит через воду или любую среду, более плотную, чем воздух, ультразвук также преломляется, а алгоритмы реконструкции изображения исправляют это искажение, которое возникает, когда ультразвуковые волны переходят из воды в воздух.
На сегодняшний день PASS был протестирован только в лаборатории в контейнере размером с большой аквариум. «В текущих экспериментах используется статическая вода, но в настоящее время мы работаем над решением проблемы волн на воде», - сказал Фитцпатрик. «Это сложная, но мы думаем, что это выполнимая проблема».

Бесконтактные методы визуализации на акустической основе представляют большой интерес для сообществ, занимающихся медицинской визуализацией и неразрушающим контролем.
Традиционные технологии получения изображений
Сонар
Гидролокатор является подходящей системой обнаружения, в первую очередь благодаря его низкому затуханию в воде и, следовательно, возможности получения изображений на большом расстоянии. К сожалению, звуковые волны плохо передаются через границу раздела воздух-вода.
Радар
Распространение радиоволн в воде в значительной степени ограничено из-за высокого поглощения и, следовательно, ограниченной глубины проникновения. Радиоволны крайне низкой частоты и очень низкой частоты. Однако длины волн на этих частотах составляют порядка десятков километров, что требует массивных антенн с низкой эффективностью излучения. Помимо ограничений на антенну, большие длины волн и ограниченная доступная полоса пропускания на этих частотах не позволяют получать изображения с приемлемым разрешением.
Лидар
Из традиционных подходов к активной визуализации, лидар наиболее применимым для подводной съемки с бортовой платформы. В видимом спектре, особенно при сине-зеленом лазерном свете, оптическое поглощение позволяет проникать на большую глубину в чистой воде. Однако лидар начинает выходить из строя в практических условиях океана, где твердые частицы значительного размера относительно коротких оптических волн находятся во взвешенном состоянии в воде.
Поверхностная виброметрия
Во многих работах изучается создание подводных акустических источников бесконтактным способом для приложений, включая связь и зондирование. Обычно эти решения основаны на взаимодействии лазера с поверхностью воды.
