
КОМУ ПОНАДОБИЛОСЬ ВНЕДРЯТЬ ШАГАЮЩИЕ МАШИНЫ — И ЗАЧЕМ?
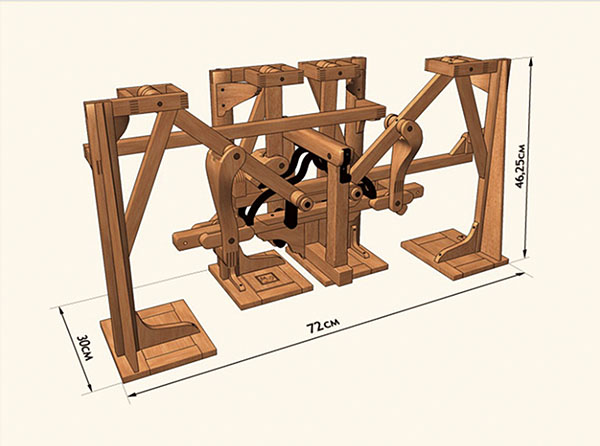
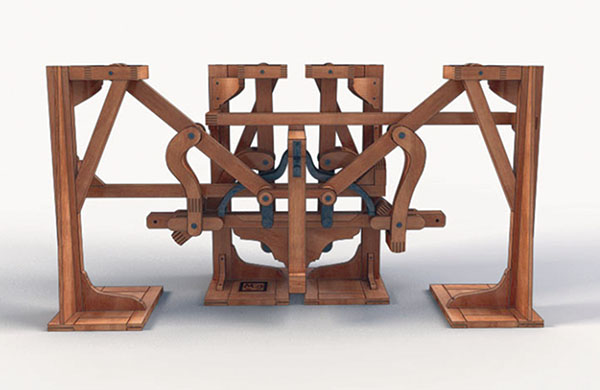
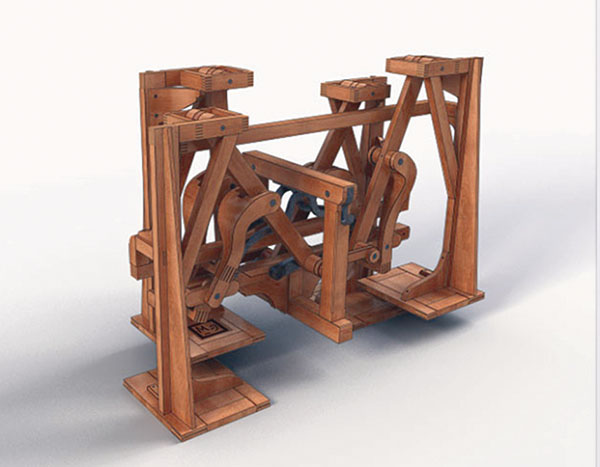
Гениальная идея пришла в голову русского математика и механика позапрошлого столетия Пафнутия Чебышева — академика ни много ни мало 25 академий мира. Модель стопоходящего механизма была продемонстрирована на Всемирной выставке в Париже в 1878 г. К настоящему времени деревянный макет стопохода сохранился в Политехническом музее города Москвы. Усилиями сетевого проекта «Математические этюды» на его основе даже создали 3D-модель.
4 (16) мая 1821 — 26 ноября (8 декабря) 1894. Русский математик и механик, основоположник петербургской математической школы, академик Петербургской академии наук.
Согласно легенде, Чебышев взял за основу походку лошади, когда наблюдал за проезжающими каретами. Механик понял, что траектория движения лошадиного копыта может стать крайне рациональной в техническом применении. Как ни странно, но до конца XIX в. никому не приходило в голову адаптировать естественные движения людей и животных — к работе механизмов. По крайней мере, не в фантазиях, а на практике.
Мысль о конкурировании механических ходуль с паровозами, трамваями и конками — лишь на первый взгляд может показаться абсурдной и нелепой. У Чебышева имелись весомые резоны считать иначе. Ведь применение стопоходов позволяет обеспечить повышенную проходимость, недоступную колесным транспортным средствам, а также существенно снизить нагрузки на материалы, тем самым добиваясь материальной экономии.
Взрывное развитие железнодорожного транспорта позволило очень быстро соединить в единую коммуникационную и хозяйственную сеть значительные пространства. Так, например, в одном 1900 г. построили 1 000 км одной только Китайско-Восточной железной дороги.
Но, вместе с тем, для того чтобы прокладывать транспортное полотно, требуются ощутимые затраты, обусловленные расчисткой территории, доставкой необходимых материалов к местам прокладывания и т. д. К тому же до крайности затруднительно масштабное железнодорожное строительство на зыбких почвах. Да и горные массивы зачастую становятся непреодолимыми преградами.
Колесные же транспортные средства, движущиеся не по рельсам, а по пересеченной местности, сталкиваются с сопротивлением грунта, а иногда — даже каменных и древесных массивов. Какими бы большими и мощными ни были колеса, изнашиваемость подобного механизма в экстремальных дорожных условиях крайне высока. Естественные барьеры лучше преодолевать, не входя с ними в непосредственное физическое соприкосновение. Это-то и возможно с помощью стопоходящих механизмов, которые способны перешагивать через препятствия.
Наряду с данным значимым преимуществом, имеются и такие, как возможность относительно свободной «маршировки» по зыбкой местности, а также отсутствие характерной колесной колеи, подчас уродующей и разрушающей дорогу.
Конструкция, однако, имеет и минусы, притом серьезные, способные перечеркнуть плюсы. К числу минусов относятся: громоздкость, низкая маневренность, медлительность. Речь, впрочем, изначально и не шла о лихом преодолении с помощью стопоходов дистанций в сотни и тысячи километров. Во главу угла ставилось перемещение на проблемных участках, осложненных буреломами, буераками, неширокими речушками и т. д.
Есть сведения о том, что французы настолько впечатлились изобретением Чебышева, что на выставке буквально умоляли его оставить им продемонстрированный образец. Ученый наотрез отказался от данного предложения, согласившись, однако, оставить просящим эскиз механизма. Тем не менее первое впечатление, по всей видимости, надолго не закрепилось. С точки зрения практического применения стопоходящая машина никого тогда не заинтересовала.
Лишь в мае 1947 г. советский завод «Уралмаш» выпустил шагающий экскаватор «СЭ-3» — по проекту инженера Бориса Ивановича Сатовского. Практически целое столетие понадобилось на то, чтобы конструкция смогла обратить на себя внимание и доказать свою состоятельность. Но прежде, в XIX в., негативные стороны шагающих машин, видимо, бросились в глаза больше предполагаемых сторон позитивных.
ЧТО НЕ УСТРОИЛО В КОНСТРУКЦИИ ШАГАЮЩИХ МАШИН?
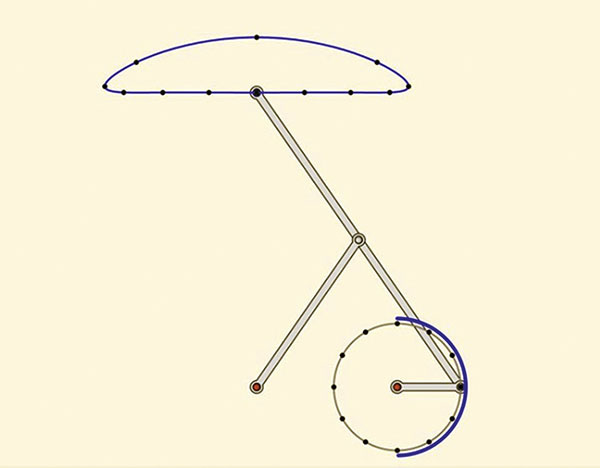
Стопоход основан на действии лямбда-механизма, т. е. устройства, преобразующего вращательные движения в прямолинейные. Это самое устройство, кстати, получило такое свое название из-за специфического строения боковых лопастей, по форме напоминающих греческую букву «лямбда».
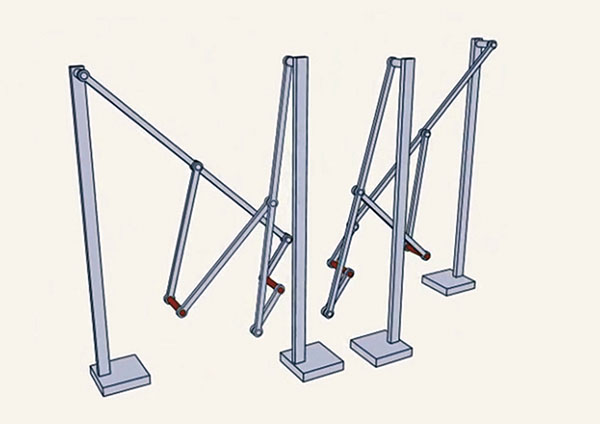
Механизм Чебышева состоит из звеньев, соединенных друг с другом в кинематические пары. Шарниры крепятся к валикам и к ползуну. Двигатель обеспечивает вращение лопастей, в результате чего конструкция начинает «шагать» по прямой. При этом как-либо разворачивать агрегат или менять ход его движения невозможно.
Судя по всему, стопоход сочли излишне громоздким и минимально управляемым — оттого-то на раннем этапе новинку и невзлюбили. У машины предусмотрена всего одна степень свободы: вращение двигателя преобразуется в одно определенное движение ползуна. В этой связи для двух рабочих звеньев предусмотрено два двигателя. Мобильность механизма исключается главным образом в связи со столь суровой привязкой.
Конструкция получается исключительно энергозатратной и утяжеленной, особенно если речь идет о «переноске» таким вот «ходячим» образом экстремально тяжеловесных грузов. Если, скажем, один паровой двигатель способен сотнями километров тянуть по рельсам целый железнодорожный состав, массой во много сотен тонн, то механизм Чебышева на подобное, увы, не способен.
Маневренность того же поезда — даже строго в рамках движения по колее — несоизмеримо выше. Ведь железнодорожный состав способен хотя бы вписываться в заранее проложенные повороты. О повышенной маневренности автомобилей и средств авиации и речи не идет. Для стопохода же любой поворот, вообще любое филигранно выверенное движение — принципиально недостижимо.
В связи с тем, что каждый отдельный двигатель обеспечивает движение каждого отдельного звена, стопоходящее устройство выходит не только громоздким и малоподвижным, но к тому же еще и до крайности энергозатратным. Как известно, для обеспечения большей массы тела кислородом требуется больший объем сердца, перегоняющий больший разовый объем крови. Означенный принцип применим и к техническим устройствам.
Наконец, движение лямбда-механизма порождает чрезвычайно сильные колебания и толчки — несоизмеримо большие, чем колебания и толчки при перемещении любого колесного транспорта. Соответственно, путешествовать на стопоходе — как минимум крайне дискомфортно, а как максимум — физически небезопасно. Да и от подобных «покачиваний» может быстро разрушиться сама конструкция, если изначально была плохо выверенной, с технической точки зрения.
Промышленники и производственники, очевидно, решили, что экономия, скорость и подвижность — в сухом остатке намного выгоднее способности перешагивать через барьеры и по зыбким почвам. К тому же барьеры можно предварительно «зачистить», а зыбкие почвы — по мере возможности «укрепить» либо вовсе обойти нежелательный участок в прокладывании путей сообщения.
Но, как ни странно, заявлять о том, что механизм Чебышева окончательно списан со счетов, — опрометчиво. С прошлым у него как-то не задалось. Зато налицо немалое — не только будущее, но и настоящее.
МОГУТ ЛИ В ДАЛЬНЕЙШЕМ ВЕРНУТЬСЯ К ВОПРОСУ О ШАГАЮЩИХ МАШИНАХ?
Не только могут, но уже сейчас стопоходы применяются, причем чем дальше, тем шире — и тем в большем количестве хозяйственно-технических областей. Первоначально отдельные элементы механизма Чебышева массово использовались лишь в статично зафиксированных механизмах. Например, в автоматически открывающихся и закрывающихся автобусных и троллейбусных дверях. Однако в дальнейшем распространение стало куда более объемлющим.
Мы уже упомянули шагающий экскаватор. Нелишне было бы отметить также, что подобные конструкции великолепно справляются с разнообразными горными работами. Особенно когда приходится иметь дело со значительными возвышенностями и углублениями, а также с подъемом значительных масс руды. Конструкция оказывается долговечной, надежной и устойчивой.
Принцип механизма Чебышева активно внедряют в робототехнику. «Роботы-официанты», «роботы-учителя», прочие марширующие дроиды — все это уже давно не придумка авторов «Звездных войн» и «Терминаторов». Есть уже и такие антропоморфные механизмы, которые не только повторяют элементарные движения нашего тела, но и способны действовать в экстремальных ситуациях. Даже если данные механизмы — не «двуногие», а «четвероногие».
Так, например, американский робот Cheetah с 2013 г. удивляет повышенными «беговыми» способностями, развивая и удерживая скорость до 25 км/ч. Устройство выполняет задачи посыльного, при этом смастерено настолько добротно, что ему не грозят выходки вандалов и хулиганов. А для работы в космосе уже даже приспособили «робота-шимпанзе» Charlie.
Как видим, достижение механико-математического академика опередило свое время на 100 с лишним лет, подобно грандиозным задумкам Леонардо да Винчи. Может даже статься, что в наибольшей мере и в наибольших масштабах стопоходы приживутся еще нескоро. Но уже очевидно, что у них весьма неплохие перспективы.
