
Древнейшие находки тетрапод (четвероногих), имевших принципиальную возможность передвигаться не в водной среде, приходится на период 395-360 миллионов лет назад. Разумеется, 100 миллионов лет не такой маленький срок. Приблизительно столько времени прошло с эры расцвета динозавров. С тех пор динозавры успели исчезнуть с лица Земли, а неказистый класс млекопитающих достиг очень впечатляющих успехов. Возраст вида homo sapience и вовсе исчисляется жалкими сотнями тысяч лет. И всё же большинство учёных до сих пор придерживались мнения, что Orobates pabsti не так уж далеко уполз от своих предков, как, впрочем, и другие четвероногие ранней перми. Их жизнь была тесно связана с водоёмами, и по суше они передвигались очень неуклюже, волочили длинный хвост и пузо по земле, с трудом отталкиваясь лапами. Более же прогрессивный способ передвижения, когда туловище опирается на сильные конечности и поднято высоко над землёй, появился гораздо позже.
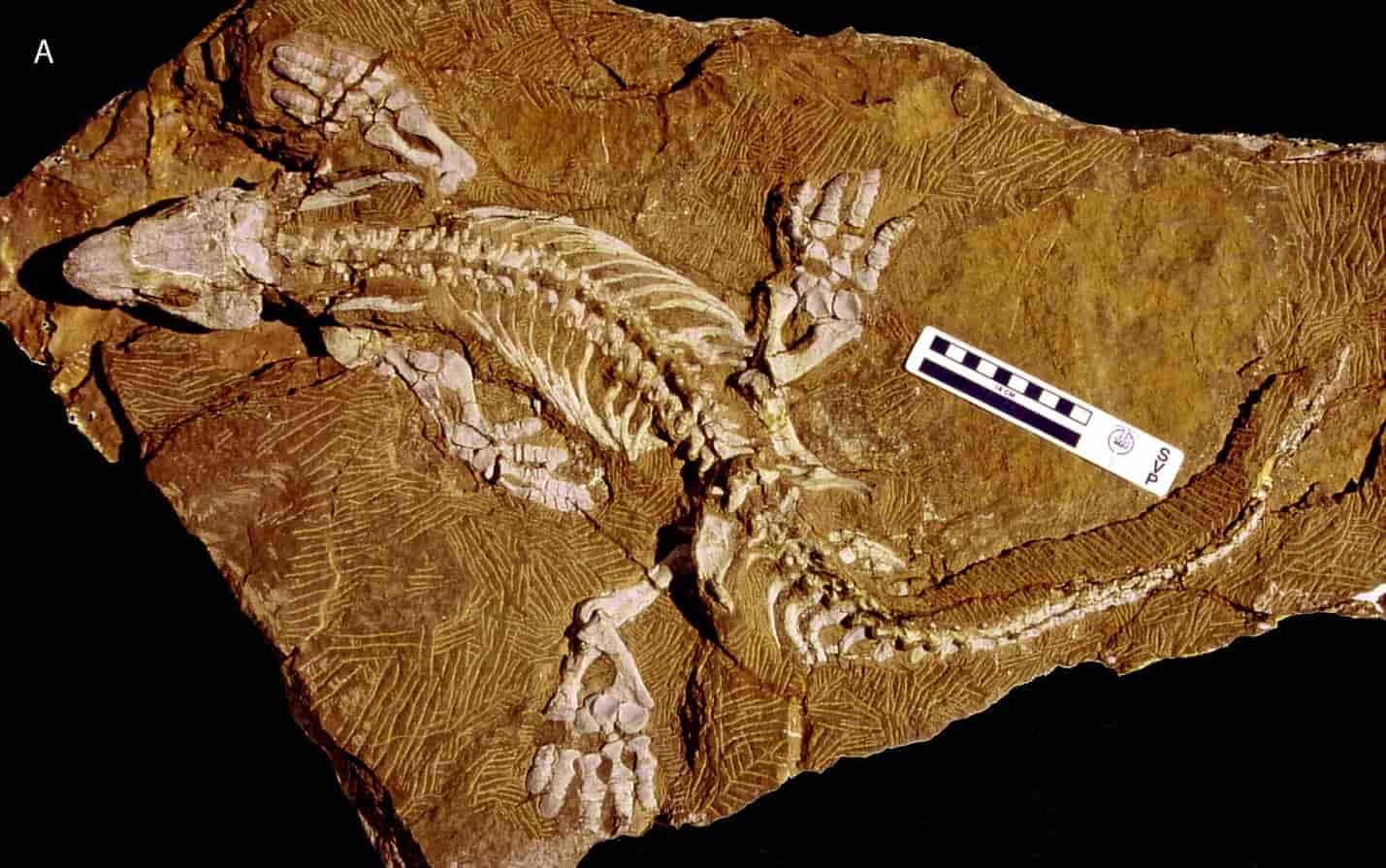
Так думали палеонтологи до тех пор, пока не взялись всерьёз за изучение Orobates pabsti. Это животное, размером с небольшую собаку, было впервые описано в 2004 г. по нескольким хорошо сохранившимся скелетам, найденным в Германии. Считается, что оробаты были близкими родственниками последнего общего предка рептилий, земноводных и млекопитающих — то есть располагались на перекрестке эволюционного древа. Поначалу полагали, что своим способом передвижения оробат более всего похож на саламандру, потом, что он ближе к кайману. Когда были найдены цепочки окаменелых следов, отпечатков лап, это послужило толчком к созданию новых моделей с использованием новейших технологий.
На первом этапе команда исследователей создала трехмерную цифровую модель скелета, тщательно проработав мельчайшие детали. Затем были собранны данные об особенностях походки родственников – саламандр, кайманов, игуан. Информация о том, как работают суставы во время ходьбы, получили с помощью съёмки, которая велась в рентгеновском диапазоне. Собрав данные в виртуальную модель скелета внесли соответствующие поправки и «заставили» ее пройтись по имеющейся цепочки следов.
Однако виртуальная модель она и есть виртуальная. Учёные опасались, что она может не учитывать каких-то сторон материального мира, а потому решили воплотить её «в железе». Из пластика и металла был создан робот, который внешне воспроизводит скелет доисторического животного и обучен его походке, воссозданной на его цифровой модели. Робота назвали OroBOT. Первые попытки Оробота научиться ходить были не слишком удачными, и он даже сломал себе ребро, но потом дело пошло на лад. Оказалось, что он отличается большой подвижностью и во время ходьбы может держать тело высоко, не волоча по земле живот и хвост.
Напоминаем Вам, что в нашем журнале "Наука и техника" Вы найдете много интересных оригинальных статей о развитии авиации, кораблестроения, бронетехники, средств связи, космонавтики, точных, естественных и социальных наук. На сайте Вы можете приобрести электронную версию журнала за символические 60 р/15 грн.
В нашем интернет-магазине Вы найдете также книги, постеры, магниты, календари с авиацией, кораблями, танками.
