
Летающие платформы
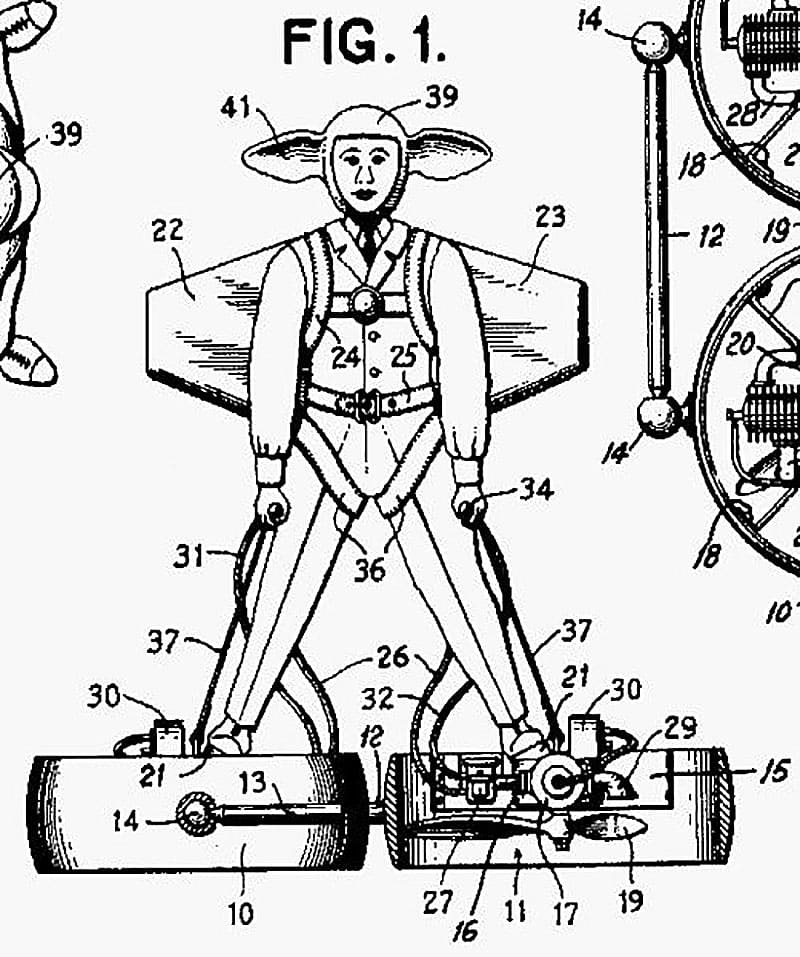
История развития летающих платформ началась в 1946 году, когда инженер Чарльз Хортон Циммерман (Charles Horton Zimmerman) спроектировал маленький, вертикально взлетающий летательный аппарат с двумя винтами противоположного вращения. Летчик размещался стоя на платформе, к которой снизу прикреплялся двигатель и трансмиссия. Для управления полетом Циммерман предполагал использовать небольшие крылья, закрепленные за спиной летчика, и рулевые поверхности на его защитном шлеме. Причем, последние своей формой походили на ослиные уши, что сильно веселило скептиков этой идеи.

Циммерман был широко известен в авиационных кругах своими необычными идеями и разработками. Работая в Национальном консультативном комитете по аэронавтике (NACA) с 1931 года, он зарекомендовал себя достаточно грамотным инженером, и выделился из общей массы сотрудников своей работой над совершенствованием аэродинамических труб.
В 1933 году, работая «на трубе» и будучи в курсе всех работ ведущихся в Комитете, Циммерман решил попробовать себя в качестве авиаконструктора и принял участие в конкурсе на гражданский легкий самолет. Его проект представлял собой дископлан с двумя винтами большого диаметра. Необычный внешний вид самолета обеспечил ему полный провал, но Циммерман не опустил руки и продолжил работать над проектом. В результате ему удалось построить и испытать свой летательный аппарат, который вошел в историю авиации как первый в мире истребитель укороченного взлета и посадки — F5U. Его таинственный внешний вид до сих пор продолжает будоражить умы историков авиации и порождать легенды в головах дилетантов. В разное время эту машину называли «Летающим парашютом», «Летающим блином», «Шумовкой» или «Летающей тарелкой Циммермана».

Зная о безумном, в хорошем смысле этого слова, таланте Циммермана, руководство NACA поддержало идею о летающей платформе и предложило ему продолжить исследования по этой теме на экспериментальной станции реактивного движения NACA на острове Уэллопс.
FLYING SHOES
Для доказательства возможности создания летающей платформы на станции построили специальное экспериментальное устройство. Его конструкция отличалась чрезвычайной простотой. В центре фанерной пластины размерами 0,5 х 0,75 м было закреплено сопло, к которому из большого баллона по шлангам подавался сжатый воздух. Для имитации гироскопического эффекта, создаваемого вращающимися винтами, под пластиной закрепили два стальных диска, которые вращались в противоположных направлениях электромотором со скоростью 7000 об/мин. Проблема обеспечения подобия моментов инерции — ведь масса винтов значительно превосходила массу дисков — решалась прикрепленными к дискам грузами. Пилот должен был стоять на пластине, а чтобы он случайно не соскользнул с фанерки, его ноги намертво привязывались к оной при помощи кожаных ремней. За эту милую особенность устройство немедленно получило свое веселое прозвище Flying Shoes — Летающие ботинки.

Все полеты «Ботинков» совершались летчиком Дэвидом Хендерсоном (David Henderson) со страховкой циркового типа. По отзывам Хендерсона, «Ботинки» оказались вполне управляемыми. Для сохранения устойчивости ему нужно было совершать естественные движения для сохранения равновесия, подобные тем, которые инстинктивно происходят при езде на велосипеде, но если равновесие терялось — аппарат мгновенно опрокидывался. Стало ясно, что без дополнительных усовершенствований «Ботинки» к свободным полетам не пригодны.
Улучшить устойчивость попытались за счет установки сидений различной формы. Наиболее удачным оказалось сиденье, или если хотите седло, велосипедного типа, шарнирно закрепленное на длинном стержне так, чтобы летчик движением ног мог менять наклон сиденья. Но это не решало проблему в принципе.

Через год напряженных поисков и экспериментов Циммерман все-таки нашел необходимое для устойчивости аппарата техническое решение, как всегда простое до гениальности, — он увеличил площадь пластины и добавил к ней поручни, держась за которые летчик мог более точно отслеживать движения аппарата и своего тела. Теперь «Ботинки» стали почти безопасны, и конструктор начал собирать новый аппарат, получивший название Flying Platform — Летающая платформа.
FLYING PLATFORM
Летающая платформа представляла собой стальную трубчатую раму с четырьмя амортизационными опорами. В центре рамы находился стальной диск диаметром 0,5 м, с подшипником вала воздушного винта диаметром 2,15 м. Колебания лопастей винта ограничивались пружинами. Винт приводился во вращение тягой сжатого воздуха, истекающего из сопел на концах лопастей. Уже известная фанерная пластина для летчика жестко крепилась к стальному диску с подшипником — так, чтобы летчик чувствовал наклон рамы относительно винта. Между пластиной и диском проложили лист мягкой губчатой резины, края которого прикрепили к раме, образовав упругую подвеску. Круговые поручни закрепили к раме на трубчатых стойках. Небольшой момент трения в подшипнике мог завращать аппарат — и для компенсации этого вредного явления использовали маленькое реактивное сопло, выбрасывающее сжатый воздух в направлении противоположном вращению винта. Расход воздуха из этого сопла регулировался клапаном, расположенным справа от летчика. Общий вес конструкции составлял 64 кг.

Испытания Flying Platform проводили в ангаре, летчик и аппарат привязывались тросами к потолку. Во время полета на высоте около 40 см устойчивость и управляемость были удовлетворительными. Характеристики аппарата почти не изменились, когда с лопастей сняли ограничители взмаха. Жесткий же винт, напротив, привел к значительным нарушениям равновесия аппарата, и даже незначительные случайные движения тела приводили к возникновению незатухающих колебаний или прецессионному движению. Положительное влияние оказывала близость земли, улучшавшая устойчивость аппарата как при вертикальных, так и при угловых движениях. 1 февраля 1955 года аппарат Flying Platform совершил свой первый свободный полет.
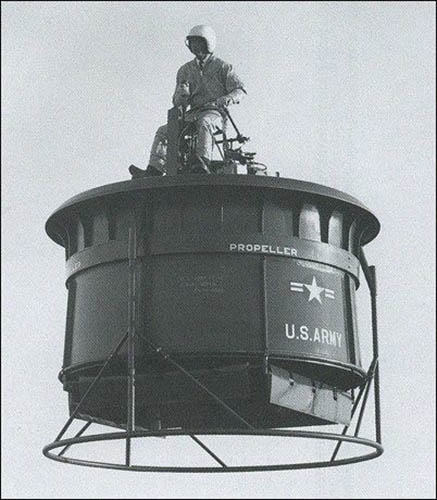
По сравнению с «Летающими ботинками» он стал значительным шагом вперед, и в 1956 году ВМС США заказали один экспериментальный образец боевой платформы под обозначением VZ-1 Pawnee. Название было дано в честь индейского племени, проживавшего на территории штата Небраска. Для снижения габаритов летающей платформы конструкторы решили использовать воздушный винт в кольцевом канале. Такой винт развивает значительно большую тягу, чем обычный, но и требует более мощной силовой установки. Это связано с увеличением в несколько раз нагрузки на ометаемую площадь, которая для обычного вертолета достигает величины 15-30 кг/м², а для аппарата с винтом в кольцевом канале — 80-100 кг/м².
VZ-1 PAWNEE
VZ-1 строили в отделе перспективных исследований известной вертолетостроительной фирмы Hiller — Hiller Advanced Research Division (HARD). Основой конструкции являлась ферменная конструкция из труб, к которой крепились кольцевой канал, платформа с двумя двигателями, поручни и топливный бак. Кольцевой канал состоял из нижней алюминиевой цилиндрической части с четырьмя амортизационными стойками и верхней части, расширяющейся в виде фланца из стеклотекстолита. Во время работы винтов, при протекании воздуха через канал, над фланцем создавалась область пониженного давления, а под ним сохранялось нормальное давление. За счет этого на фланце возникала дополнительная подъемная сила. В качестве силовой установки использовали два поршневых двигателя Nelson H-56 мощностью по 43 л.с., приводящих во вращение соосные винты диаметром 1,8 м. В полете двигатель управлялся от мотоциклетной рукоятки, закрепленной на поручнях.

Для пространственного управления летающей платформой использовался метод кинетического управления, предложенный Циммерманом и опробованный во время испытаний Flying Platform. При вертикальном взлете и в режиме висения летчик старался стоять так, чтобы центр тяжести лежал на одной оси с тягой винтов. Для движения вперед летчик наклонялся, опираясь на поручни, и аппарат наклонялся в ту же сторону. Возникала горизонтальная составляющая тяги винтов — и платформа летела в нужном направлении.
В то время теория винта в кольцевом канале была очень несовершенна, и расчет винта в режиме горизонтального полета, когда поток воздуха направлен под углом, получился весьма приближенным. Поэтому для определения истинных характеристик аппарата пришлось строить специальный стенд с аэродинамическими весами. Для имитации горизонтального полета стенд с закрепленным аппаратом поставили на грузовик и начали измерения тяги винтов и сил во время движения автомобиля. Оказалось, что, двигаясь со скоростью 25 км/ч, аппарат неминуемо опрокинется. Перемещение тела летчика вперед не сможет скомпенсировать кабрирующий момент от винтов.

В течение 1957 года проходили испытания летающей платформы на привязи. В целях безопасности на летчика надели обычные парашютные ремни, соединяющиеся с помощью специальной системы подвески к блоку, скользящему по тросу, протянутому между двух ферменных мачт. После того, как конструкторы убедились в достаточной устойчивости своего «детища», были разрешены свободные полеты, но горизонтальная скорость ограничивалась величиной 10-15 км/ч. Летчик поднимался на высоту около 15 метров и совершал полеты в разных направлениях. Продолжительность полетов не превышала 15 минут.
После успешных испытаний VZ-1 Pawnee на фирме Hiller приступили к постройке предсерийного образца нового аппарата с обозначением VZ-1E. На него поставили уже три поршневых двигателя мощностью по 41 л.с. каждый. Диаметр соосных винтов в кольцевом канале достиг величины 2,45 м. Аппарат мог продолжать полет и при отказе одного из двигателей. Большие размеры и вес аппарата уже не позволяли использовать принципы кинетического управления — и его пришлось оснастить четырьмя рулями, установленными в потоке воздуха от винтов. VZ-1E предполагалось принять на вооружение армии США для выполнения связных и разведывательных задач.

Предчувствуя успех, Hiller пошла еще дальше и начала проектирование четырехместного аппарата с тремя турбовинтовыми двигателями (ТВД), для перевозки небольших грузов и личного состава. Диаметр винта в кольцевом канале у этого аппарата равнялся 5 метрам. Выхлопные газы от ТВД отводились вниз, создавая дополнительную тягу, а управление осуществлялось за счет рулей в воздушном потоке винта.
Фирма построила три опытных образца своих платформ и испытывала их до 1963 года. Военные, сначала относившиеся к программе с большим энтузиазмом, постепенно утрачивали интерес к VZ-1. Главным препятствием на пути принятия платформы на вооружение стал скоростной барьер в 25 км/ч. Циммерману так и не удалось придумать технического решения, позволяющего компенсировать кабрирующий момент на этой скорости. Программа была закрыта.
HZ-1 AEROCYCLE
В своем стремлении создать индивидуальную летательную платформу Циммерман и фирма Hiller были не одиноки. Среди других разработчиков наибольшего успеха добился конструктор и основатель одноименной фирмы — Де Лекнер (De Lackner Helicopter Company). Свой необычный летательный аппарат он назвал Heli-Vector. Он представлял собой перевернутый вертолет соосной схемы, у которого двигатель, трансмиссия, система управления и летчик располагались не под, а над винтами. Винты — двухлопастные, изменяемого шага с деревянными лопастями из бальсы и красного дерева. Для повышения прочности лопасти оклеивались стеклотканью. Форма лопастей в плане трапециевидная. Над винтами, возле ног летчика, закреплялся двигатель водяного охлаждения Kieckhaefer Mercury Mark 55 мощностью 30 л.с., при 7000 об/мин. Винты приводились во вращение цепной передачей через муфту сцепления. В трансмиссии имелось устройство автоматического регулирования вращающего момента. К платформе прикреплялась колонка управления с мотоциклетным рулем. На колонке крепился топливный бак емкостью 5 литров. Шасси аппарата ферменное с четырьмя надувными баллонами. Еще один баллон, более крупных размеров, крепился к центральной части фермы. Такое шасси позволило совершать посадки аппарата как на сушу, так и на воду. Летчик стоял на платформе и привязывался ремнями к колонке управления.

Первый полет на привязи состоялся 22 ноября 1954 года, а с января 1955 года начались свободные полеты. Всего совершили более 160 полетов общей продолжительностью 15 часов, с посадкой на сушу и на воду. Во время испытаний Heli-Vector свободно летал на высоте нескольких метров. Оказалось, что аппарат прост в управлении и не требует от пилота специальной подготовки. Руководствуясь принципами кинетического управления, сформулированными Циммерманом, летчик наклонял аппарат; при этом возникала горизонтальная составляющая тяги и Heli-Vector летел вперед. При отказе двигателя аппарат мог совершить посадку в режиме авторотации.
После летных испытаний Лекнер предложил свой аппарат военным, в качестве конкурента летающей платформы Циммермана. Армейский Heli-Vector получил обозначение HZ-1 Aerocycle.
Испытания необычного аппарата поручили опытному вертолетчику (1500 часов налета) капитану Селмеру Сандбай (Selmer Sundby). Он довольно быстро освоил Aerocycle и совершил на нем множество полетов, в том числе и самый продолжительный полет в 43 минуты. Дважды он попадал в аварии. Один раз он повредил аппарат во время полета на привязи и один раз — в свободном полете, на скорости 48,3 км/ч. В последнем случае аппарат получил сильные повреждения, а Сандбай отделался легкими травмами. Причиной аварий стал захлест лопастей и их последующее разрушение.

После аварии с HZ-1 сняли надувное амфибийное шасси, заменив его на обычные вертолетные салазки, и установили небольшое горизонтальное крыло, парирующее кабрирующий момент. Эти доработки пошли только на пользу, и в одном из полетов Сандбай разогнал аппарат до 110 км/ч. Простота и легкость управления понравились военным: обычный солдат мог управиться с Aerocycle после 20-минутного инструктажа. Но проблему захлеста лопастей решить не удалось. Кроме этого, грузоподъемность Aerocycle оставляла желать лучшего, да и ничем не прикрытые винты могли нанести смертельные травмы окружающим. Поэтому дальнейшая разработка HZ-1 была прекращена.
Продолжение следует
Статья была опубликована в ноябрьском номере журнала "Наука и техника" за 2009 год
