
Идея скопировать и перенести способ движения морских животных на технику не нова, еще 100 лет назад русский изобретатель волновых движителей Митурич, предлагал движитель в форме рыбьего корпуса для судов, глиссеров, самолетов и дирижаблей.
Рыбы и медузы натолкнули ученых в Стэнфорде создать подводные дроны, передвигающихся в воде подобным образом. Эксперименты начались в конце прошлого века. В 1990-е гг. в лаборатории Дрейпера (Draper) в США разработали беспилотный подводный аппарат повышенной маневренности на основе технической имитации движения рыб. Он имел массу 130–150 кг, длину — 2,4 м и развивал скорость до 5 км/ч. А в Массачусетском технологическом институте создали подводный робот Pike («Щука») длиной ~ 0,7–0,8 м.

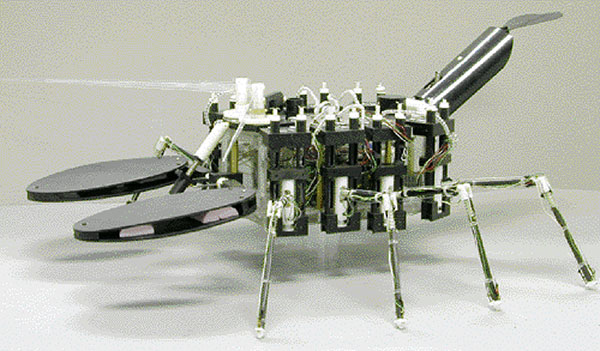
Рыбами дело не ограничилось. В ходе реализации программы Biomimetic Underwater Robo в США были разработаны макетные образцы двух подводных микророботов: «Робот-лобстер» (Lobster Robot) и «Робот-минога» (Undulatory Robot).

Такие разработки велись не только в США, но если американцы предполагали главным образом военное использование, то японцы озаботились созданием относительно недорогих (от 140 долларов США) игрушек. Компания TakaraCo разработала две модели подводных роботов Aquaroid Fish: рыбу и медузу, работающих от солнечных и световых батарей. Рыбоподобный робот имел массу ~2,5 кг, длину 50 см и был способен под водой развивать максимальную скорость ~0,9 км/ч. Размещенные в нем аккумуляторные батареи обеспечивают его плавание под водой в течение 30 мин.

Ранние образцы роботов, имитировавших морских животных, были еще очень несовершенны. Потом их стали создавать из мягких ультрасовременных материалов и снабжать сложной микроэлектроникой. В последнее время стали использовать даже биоматериалы. Механизм их движения все более и более точно воспроизводил естественный. Так, в 2018 г. ученые из Лаборатории компьютерной науки и искусственного интеллекта Массачусетского технологического института (CSAIL) представили мягкую роботизированную рыбу, получившую имя SoFi.
В 2019 г. инженеры-механики из Университета штата Вирджиния (UVA) вместе с биологами из Гарвардского университета создали роботизированную рыбу Tunabot, которая имитирует движения желтоперого тунца. Правда, тунец — довольно крупная рыба, а робот — всего 25,5 см в длину. Однако он может достигать максимальной частоты ударов хвоста в 15 герц и за секунду преодолевать расстояние, в четыре раза превышающее длину его тела.
В 2018 г. команда ученых из Флоридского Атлантического университета и Управления военно-морских исследований сообщила о создании робота-медузы, предназначенного для мониторинга Мирового океана и обладающего довольно большой маневренностью.
Но проблема в том, что для того, чтобы двигаться со скоростью, близкой к скорости животного-прототипа, всем этим аппаратам нужно тратить гораздо больше энергии, чем живым существам. Роботы-рыбы и роботы-медузы оказались жестко привязаны к внешним источникам питания. Эту проблему всячески пытались обойти, но не слишком успешно. И тогда возникла другая идея. Зачем делать аппарат с нуля из искусственных материалов, если можно использовать механизм, уже созданный природой, лишь чуть-чуть его подправив? Используя собственный метаболизм животного, можно существенно снизить зависимость от внешнего источника питания, а собственная его регенерация помогает противостоять повреждениям.

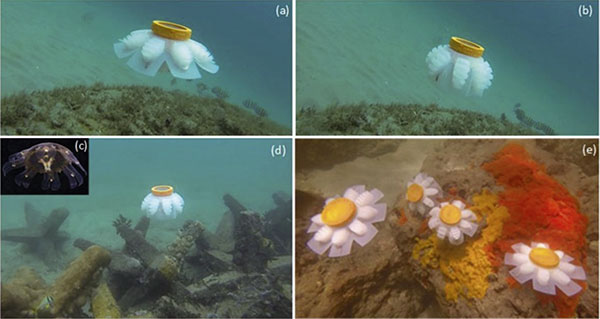
Для создания биогибридного робота выбрали медузу-аурелию. По краю колокола расположили восемь стимуляторов мышечной активности, каждый из которых может быть активирован в нужный момент, и вживили микроэлектронный контроллер. Контроллер состоит из мини-процессора Tiny Lily (Tiny Circuits, Акрон, Огайо, США) и литий-полимерного элемента емкостью 10 мАч (GM 201212, Power Stream TechnologyInc., Orem, UT)., США) заключенного в цилиндрический полипропиленовый корпус диаметром 2,11 см и герметизированного пленкой Parafilm M (Bemis Company Inc., Ошкош, Висконсин, США).
Два проволочных электрода состояли из серебряной проволоки, покрытой перфторалкокси (PFA), с оголенным диаметром 76,2 мкм и диаметром с покрытием 139,7 мкм и наконечников платиновых стержней диаметром 254,0 мкм (A-M Systems, Sequim, Вашин- гтон, США). Провода были последовательно соединены со светодиодами Tiny Lily 10402 (светодиоды; Tiny Circuits, Акрон, Огайо, США) для визуального подтверждения электрического сигнала. Таким образом, можно стимулировать мышечные сокращения от 0,25 до 1,00 Гц. Плавательные испытания с имплантированной системой проводились в резервуаре с морской водой 1,8 х 0,9 х 0,9 м.

Получившийся в итоге биоробот движется несколько иначе, чем живая медуза, его мышцы сокращаются чаще, и за счет этого он может развивать скорость в 2,8 раза большую, а метаболические расходы организма возрастают при этом лишь в два раза. При этом ему нужен внешний источник энергии в 10 мВт. Такой гибридный робот получается как минимум на порядок, а то и на несколько порядков эффективнее, чем любой чисто механический. Также важен финансовый момент. Применяемая микроэлектронная система использует готовые компоненты менее чем на 20 долларов США.
Медузы обитают всюду в морях и океанах, в воде разной температуры и степени солености. Точно установлено, что они встречаются на глубине 3 700 км в районе Марианской впадины, а возможно, и глубже. Сделанных на их основе биороботов можно использовать для подробного изучения подводного мира, который так неохотно раскрывает человеку свои тайны.
Кроме того, эти эксперименты позволяют узнать много нового о биомеханике и энергообмене морских животных и их. Контроллер плавания позволяет проводить систематические измерения скорости потребления кислорода в тканях животных и его содержание в окружающей воде.

Полученный результат очень вдохновил исследователей. Поскольку увеличение скорости плавания не приводит к непропорционально высокому увеличению затрат энергии животных, то, следовательно, у биогибридных роботов есть еще много скрытых возможностей. Можно сделать их движения более сложными, поработать с маневренностью. В общем, перспективы открываются захватывающие, хотя и несколько пугающие.
