
Некоторым для ходьбы и бега хватает четырех или двух ног. А у многоножек может быть больше 190 пар ног — именно они делают их очень быстрыми и ловкими. С одной стороны, чем больше ног, тем тверже можно стоять на земле. С другой — непонятно, как «лишние» ноги не мешают маневренности и не снижают скорость поворота.
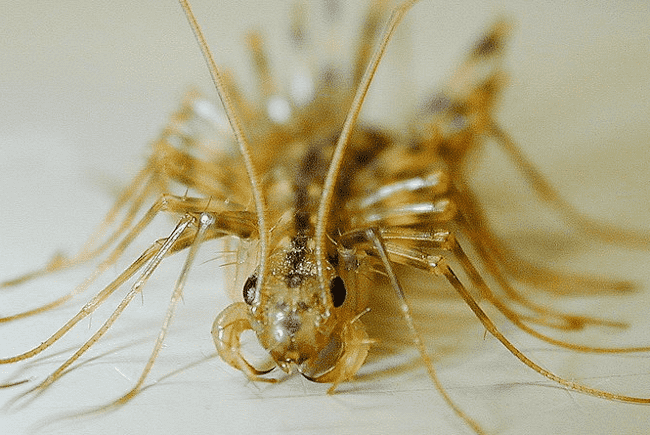
Фото: nancybeetoo / Flickr
Чтобы выяснить, почему многоножки так же ловко поворачивают, как и бегают, ученые создали модель многоногого робота длиной 135 сантиметров. Его тело состоит из шести сегментов, скрепленных между собой торсионными пружинами. На каждом сегменте располагается пара конечностей, каждая из которых состоит из двух члеников. Направление движения задает самая передняя пара ног, а остальные за ней следуют. Жесткость пружин, соединяющих сегменты тела, контролирует гибкость робота-многоножки.
Маневренность робота измеряли по скорости поворота оси тела и по длине дуги, которую он при этом описывал. Чем меньше были эти показатели, тем лучше. Оказалось, что за маневренность многоножки расплачиваются стабильностью походки: даже при движении по прямой их тело извивается. Для робота стабильность походки определялась жесткостью соединительных пружин: чем они мягче, тем легче и быстрее робот поворачивает и тем хуже он придерживается выбранного направления при движении по прямой.
Результаты исследования показывают, что стабильность движения, которой пытаются добиться создатели многоногих роботов, не всегда необходима и иногда полезнее нестабильность. В будущем ученые планируют выяснить, как другие параметры влияют на особенности движения многоногих роботов.
Статья группы исследователей из Японии опубликована в журнале Scientific Reports.
Права на данный материал принадлежат chrdk.ru
