
21 января этого года Главком ВМФ России вице-адмирал Александр Федотенков анонсировал перед журналистами продолжение в 2016 году программы по созданию безэкипажных кораблей морского и берегового базирования. Известно, что ВМС США занимаются подобными разработками уже более десятилетия. Об этом сообщило своим читателям американское информиздание «The National Interest».
|
|
|
Подводная платформа-робот Proteus |

На данный момент подобная техника находится лишь в стадии разработки. Однако американцы уже довольно давно используют морских роботов серийного производства. Летом прошлого года атомная подлодка USS North Dakota (SSN-784), относящаяся к классу «Вирджиния», при первом погружении произвела запуск и возврат на борт безэкипажного подводного аппарата Remus 600. Капитан подводной лодки Дуглас Гордон высоко оценил способности беспилотной новинки. По словам американского военно-морского эксперта и по совместительству старшего научного сотрудника Центра стратегических и бюджетных оценок Брайана Кларка, военное ведомство США занимается разработкой и созданием подводных роботов уже десять лет.
Подводные необитаемые автоматические системы (UUV) создаются, в первую очередь, для обнаружения подводных мин и разминирования, а также морской разведки. Здесь можно провести параллель с дронами, которые давно доказали свою эффективность при проведении разведки с воздуха. UUV могут запускаться с берега, с борта надводного корабля и с подводной лодки. Конструктивно они более подходят для последней, учитывая скрытность. Поэтому работы по совершенствованию подводных беспилотников идут по пути привязки их узлов и агрегатов для сопряжения с подлодками. Существует широкая классификация подобных агрегатов, согласно которой они подразделяются на пять больших категорий, в зависимости от размеров. Функциональное предназначение и диапазон выполняемых задач каждой из них во многом схож, но тем шире, чем больше размер UUV . В целом, их диаметр варьируется от менее 20 см и до 200 см и выше.
|
|
|
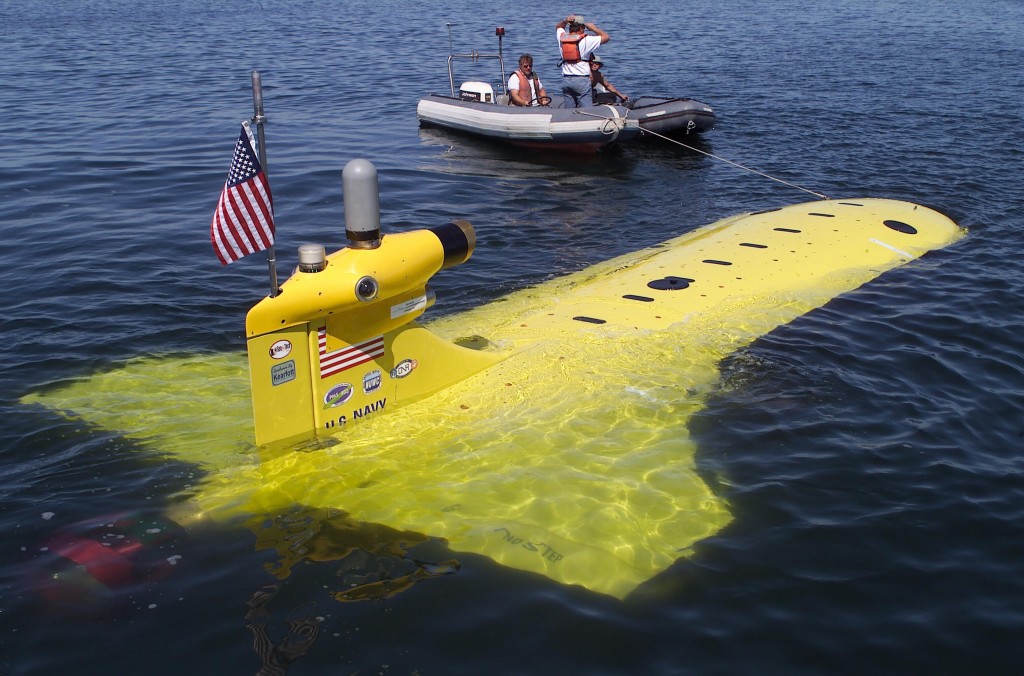
Американский крупнотоннажный подводный робот |
Итак, спектр задач широк: обследование дна и создание помех для вражеских противолодочных действий, обнаружение донных мин и их обезвреживание, использование в виде автономных торпед для уничтожения противника на дальних подступах, автономное минирование, создание радиоэлектронных помех, доставка грузов и снаряжения места, недоступные для подводных лодок.
Как пример можно привести Virginia Payload Module – подводные модули, запускаемые через торпедные аппараты подводных лодок класса «Вирджиния». Они имеют размеры, сходные с торпедами (диаметр около 200 см) и могут существенно повысить боевые возможности подлодки, в частности, значительно увеличив дальность действия систем обнаружения противника.
Из информации Главкома ВМФ Российской федерации непонятно, над какими именно типами автономных систем будут трудиться российские конструкторы – подводными или надводными. Возможно, что над обеими сразу. По крайней мере, это подсказывает логика и схожесть с тенденциями в американских разработках. На данный момент доподлинно известно лишь, что российские проекты включают в себя системы автономной глубинной разведки.
Несмотря на то, что работы по созданию морских роботов начались относительно недавно в США и совсем недавно в России, они имеют огромные перспективы. По сути, использование в будущем автономных и доведённых до совершенства безэкипажных подводных систем сможет в корне изменить сам характер действий флота, а также тактику и стратегию боевых действий на море в целом.
